
Education

Sep '21 – Dec '22
Harvard University
M.S. Computational Science and Engineering
Working with Weiwei Pan on infinite-width neural networks

Sep '21 – May '22
Massachusetts Institute of Technology
Cross-registered
ML courses: 6.867, 6.869
Quantum courses: 18.435, 6.845

Oct '18 – June '21
Technical University Munich
B.S. Computer Science, Minor in Physics, High Distinction (Grade 1.1)
Bachelor Thesis: Learning Algebraic Predicates for Explainable Controllers
Teaching assistant for Functional Programming and Theory of Computation
Experience

May '22 – Aug '22
Tesla Autopilot
Motion Planning Intern
Worked on real-time object prediction and maneuver planning.
Directly presented work to Elon.

Oct '20 – Dec '21

Competitive Programming

In Competitive Programming, you solve and implement algorithmic problems on time. Either alone or in a team.
I used to be quite active on Codeforces as fjuengermann
I used to be quite active on Codeforces as fjuengermann

Google Hashcode
- 4x qualified for World finals ('18, '19, '20, '22)
- Ranked 4th out of 10,000 teams in the qualification round 2022
- Ranked 13th and 10th in the world finals 2019 and 2020
International Collegiate Programming Contest (ICPC)
- Ranked 42th at world finals in Moscow 2021
- Gold medal at Northwestern Europe Regional Contest

International Olympiad in Informatics (IOI)
- Bronze medalist
- One of four German representatives

Google Codejam
- Ranked 124th worldwide in Round 3 out of 40,000 participants
Projects
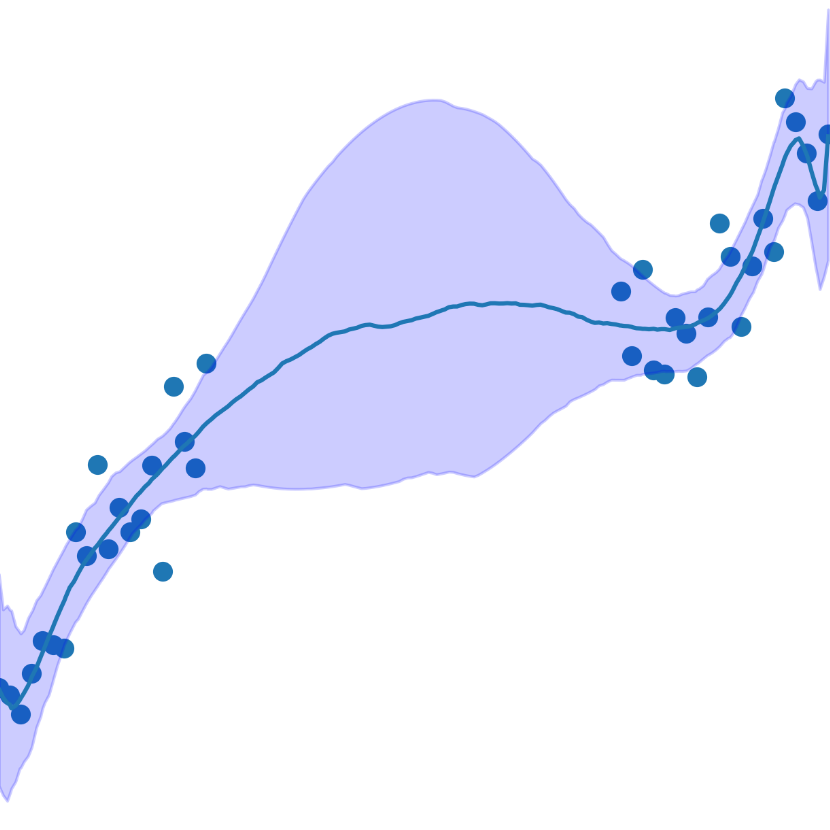
An Overview of Uncertainty Quantification Methods for Infinite Neural Networks
Harvard AM 207 project with Maxime Laasri and Marius Merkle
Looking at infinitely wide neural networks is a fruitful theoretical approach to understanding machine learning. In this limit, the networks' behavior can be precisely described by rigorous mathematical tools. Read the paper
Algebraically Explainable Controllers: Decision Trees and Support Vector Machines Join Forces
To appear in the STTT journal
Decision trees can be used as an explainable representation of controllers (a.k.a. strategies, policies). To model more complex systems, we show how to sythesize algebraic splitting predicates for the decision tree nodes. Read the paper

Advanced Algorithms Video Course
Hosted on Udemy
Udemy course with 15,000+ students. Explaining algorithms for competitive programming and job interviews.
Watch the course
Watch the course

Distributed-DALLE
First price at HackBoston 2022 with Walden Yan
An art marketplace where individuals looking for bespoke artwork can place a bounty, and creators leverage AI to generate high-quality art to compete for the bounty. Built and deployed on the Klaytn blockchain. Live website at ddalle.xyz. Source code available on GitHub.

Competitive Programming Telegram Bot
Work with Tobias Schindler
Sending live standings, smart summaries, and notifications for competitions on Codeforces with 2,000+ active users. Telegram handle @codeforces_live_bot. See a description of all features in the blog post.
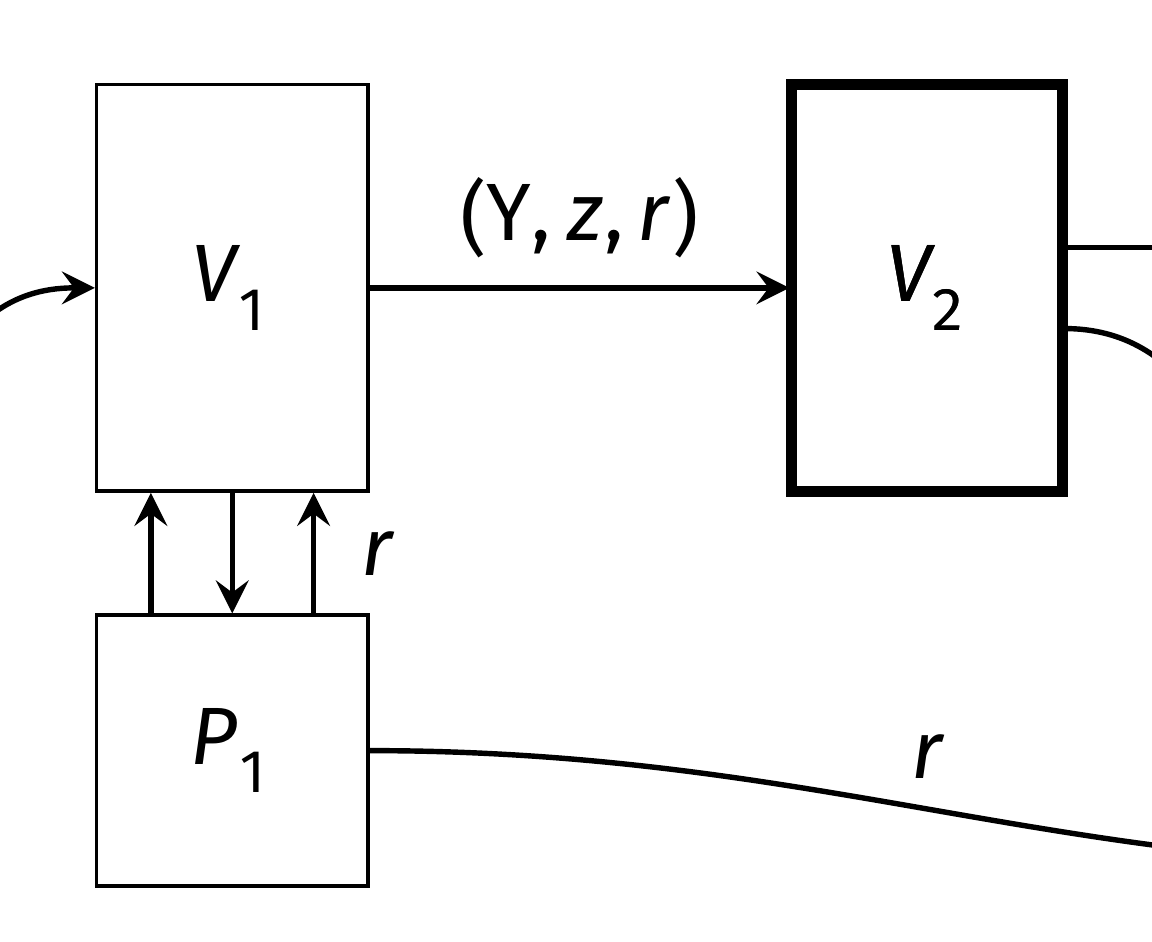
Quantum Zero-Knowledge Proofs
MIT 6.845 review paper with Taro Spirig
Review of Broadbent et al.'s zero-knowledge proof system for all problems in the complexity class QMA (the quantum analog to NP). Also covering non-interactive zero-knowledge proof systems and classical zero-knowledge arguments for QMA. Read the report
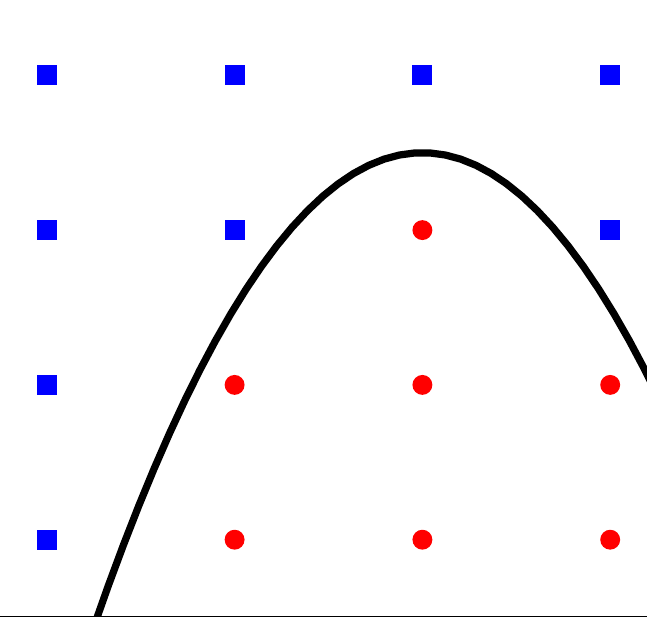
Case Studies on Physics-Informed Neural Networks
Harvard AM 205 project with Marius Merkle and Marcel Torne
Solving differential equations is hard. We use physics-informed neural networks (PINNs) to learn a solution. The loss function describes how well the differential equation is satisfied at certain sample points.
Read the report
Read the report
Parallel Planetary Impact Simulation with SPH
Harvard CS 205 project with Henry Jin, Alex Kashi, and Johannes Portik
Smoothed Particle Hydrodynamics (SPH) is a technique for simulating the physical behavior of fluids or solid matter. It is based on simulating individual particles and interpolating the fluid behavior from those. We use high performance computing techniques such as OpenMP and MPI to speed up those simulations for simulating collisions on a planetary scale.

Improved Camera Pose Estimation for NeRFs with CNNs and Curriculum Learning
MIT 6.869 project with Marcel Torne
Neural Radiance Fields (NeRF) solve the novel view synthesis problem by using a differentiable renderer to train a neural network to learn a 3d scene representation. We use curriculum learning to improve camera pose estimation while jointly training the NeRF. Read the report
On Causal Matrix Completion
MIT 6.867 project with Lucas Camelo Sa and Vı́ctor Quintas-Martı́nez
Consider a database of users and movies where each entry in the matrix describes the rating a user gave a movie. This matrix is sparse and we are interested in predicting the missing entries. In this project, we consider the case where the missingness is not random. E.g. a user does not like horror movies and thus does not rate them. Read the report
CubeSat Project MeginaSat
High school project
Worked on a satellite to orbit the earth on a low earth orbit. The project goal was to take pictures and send them back via optical data transmission. High-power LEDs would allow higher bandwidth in clear nights. I mainly worked on the ADCS system, running simulations and developing embedded code. Project Website